Hardware Development for Excavator Automation
Description
The XSCAVE project works towards automation of heavy machines as used in construction and forestry, with a special focus on excavators and forwarders. For this, we search for a HiWi that can assist us with a variety of hardware and programming tasks.
Hardware Development
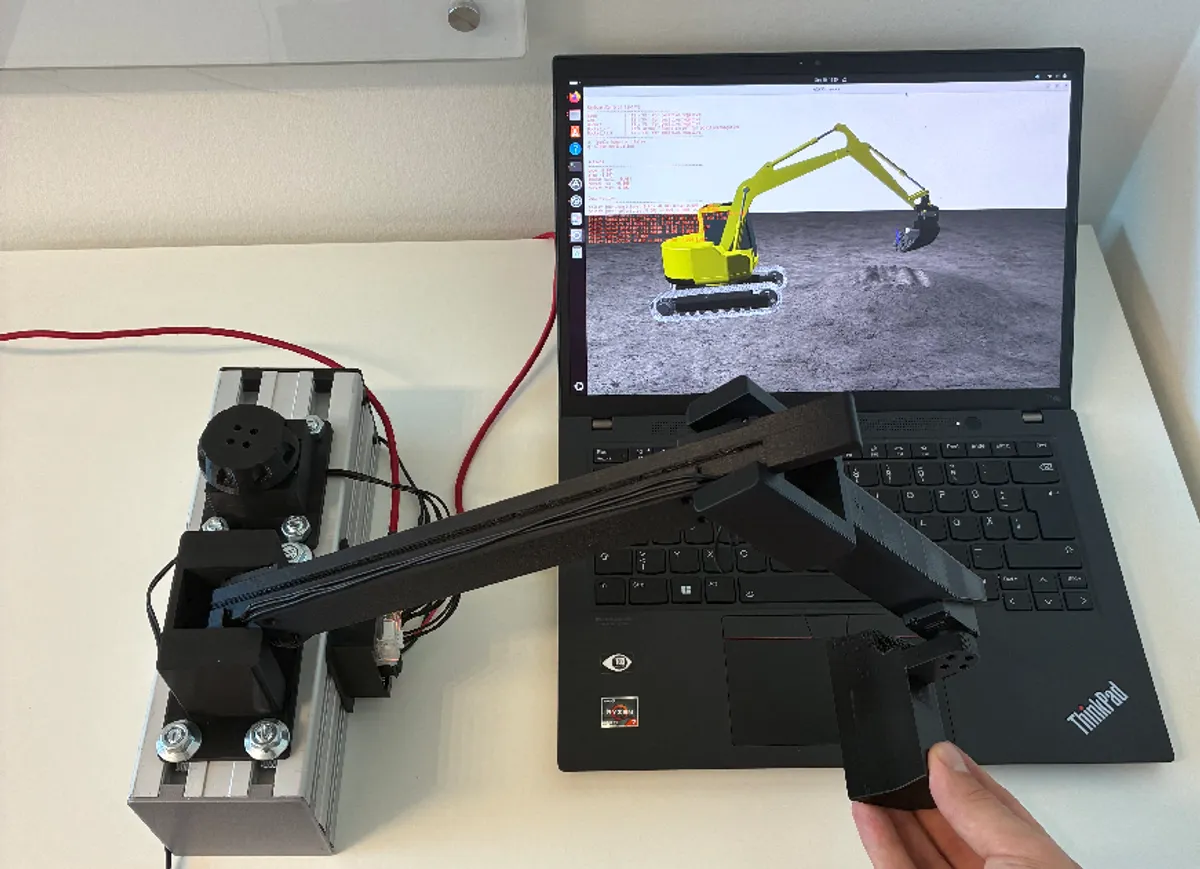
GELLO is a popular way to collect demonstration data in robotics. GELLO robots share the same kinematics as the robots they are modeled after, which makes teleoperation and data collection easy and intuitive. We currently have two GELLO robot designs based on our Komatsu PC138US excavator and its corresponding simulation model, which can be further improved and extended to other machines. Possible tasks include:
- Building more robots using the existing design
- Improving the existing design
- Designing GELLO robots for other machines, eg a forestry forwarder
- Building a RL setup around a Franka Emika Panda robot to train excavation policies in our lab
- Using teleoperation devices to collect demonstration data
Furthermore, we’d like to build a scaled-down excavator for experiments and demonstrations. For this, you would extend a LEGO (or similar) toy excavator and modify it to add computer control, cameras and other sensors such as IMUs.
Your Profile
You should be a student of computer science, electrical or mechanical engineering. It would be ideal if you have 1-2 of these skills and are open to learn the rest on the job:
- Basic knowledge of electronics and arduino programming
- Good programming skills, ideally in Python
- Basic CAD Design
- 3D Printing